跳至正文
ROS之家
MikroTik RouterOS/ROS软路由/ros论坛,ros脚本生成器,ros教程,ROS外包运维调试,ros维护,ros技术支持.
菜单
首页
最新
教程
脚本
脚本怎么用?
下载
中文汉化
客户案例
联系我们
Winbox下载
其它
ROS系统固件下载与更新
FAQ-ROS的常见问题解答
意见反馈
标签归档:
初次使用ROS
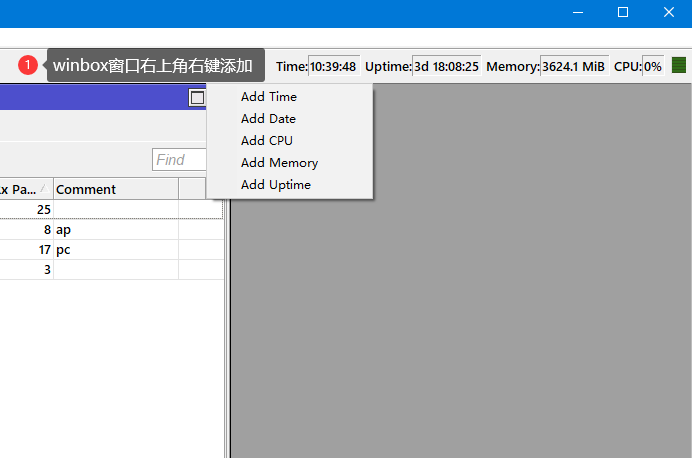
MikroTik RouterOS/ROS怎么查看cpu和内存硬件资源占用、开机时间?
打开Winbox主窗口,打开常规状态显示,操作如图:
继续阅读
→
新安装RouterOS/ROS初始状态默认IP用户名密码是什么,怎么登陆配置?
继续阅读
→
MikroTik RouterOS/ROS修改密码,ROS怎么改密码
继续阅读
→
教程-MikroTik RouterOS/ROS-pppoe用户管理,添加修改ppp用户查看在线用户
添加用户(用户名,密码,限速模板,定义到期日期,备注用户信息):
继续阅读
→
MikroTik RouterOS/ros脚本怎么用?怎么定时执行脚本
单次执行时
继续阅读
→
文章导航
←
早期文章
较新文章
→